使用指南
smartivr 为福州晋安区顶顶通软件有限公司开发的软件产品,受中华人民共和国著作权法保护,侵权必究
用户自己实现 httpAPI,机器人程序去调用这个接口,不是 机器人提供httpapi给用户调用。
外呼程序呼叫电话接通后,或者客户主动呼入接通后 机器人程序 向 webserver post 发送
smartivr –> web
{
"calleeid": "8888", //被叫号码 对于自动外呼是是流程ID
"callerid": "1500000", //主叫号码 对于自动外呼是被叫号码
"origcallerid": "", //原始主叫 对于自动外呼是主叫号码
"callid": "1fe74812-e376-4319-b335-3de1b494325c", //每个通话的唯一ID
"errorcode": 0, //错误代码
"flowdata": null, //流程数据
"flowid": "abc", //流程ID
"notify": "enter" //通知类型
}webserver根据业务逻辑 返回 json数据 比如 下面的命令就是 启动后台ASR,并且播放一个声音
smartivr <– web
{
"action": "start_asr", //第一个动作 start_asr是一个异步函数,只需要执行一次,启动后会一直进行VAD和ASR,直到调用sotp_asr
"flowdata": "流程选择", //流程数据,类似浏览器的Cookie,机器人后续httpapi请求会把这个数据发送回来。
"params": {
"min_speak_ms": 100, //最小说话时间,默认值100,单位毫秒,说话时间小于这个值,会被认为是无效声音。
"max_speak_ms": 10000, //最大说话时间,默认值10000,单位毫秒,说话时间超过这个值,就停止录音,直接提交ASR服务器识别。
"min_pause_ms": 300, //最小停顿时间,默认值300,单位毫秒,默认值用户停顿时间超过这个值,会提交到ASR识别。识别完成后发送asrprogress事件。 完成后的意思是 ASR服务器可能 300-800ms才返回识别接口。
"max_pause_ms": 600, //最大停顿时间,默认值600,单位毫秒,用户停顿时间超过这个值,认为一句话说完,所有识别完成后发送asrmessage事件。所有识别完成后的意思是,所有提交到asr服务器的识别结果都返回了。 注意 min_pause_ms 必须大于min_pause_ms。
"pause_play_ms": 200, //触发暂停放音时间,默认值0:就是禁用自动暂停,单位毫秒,建议设置200-1000,用户说话时间超过这个值,就暂停放音。 有时候用户一直持续说话,中间没停顿,所以还没提交到ASR服务器识别,不能使用关键词打断,可以先暂停放音。
"threshold": 0, //VAD阈值,默认0,建议不要设置,如果一定要设置,建议 2000以下的值。
"recordpath": "", //录音文件路径,如果不设置:就会使用配置文件中的路径,每天生成一个文件夹,如果设置了,就会使用这个参数中的目录,文件格式是 recordpath/被叫号码_Unique-ID_序号.wav
"volume": 50 //音量标准化的值。0-100,0不使用音量标准化,其他值 音量把录音音量调整到这个值后,再提交ASR识别。
},
"after_action": "playback",
"after_ignore_error": false, //如果action动作(start_asr)执行失败是否继续执行after_action(playback)。
"after_params": {
"prompt": "您好,欢迎致电顶顶通软件,这里是电话机器人演示系统,请说要进入的测试流程,比如,房产!", //可以直接播放声音文件。规则就是如果最后4个字是.wav,就直接播放wav文件。
"wait": 5000, //单位毫秒,放音结束后等待时间。用于等待用户说话。
"retry": 0 //重播次数。就是wait时间内用户不说话,就重新播放声音。
}
}机器人程序执行 “action”:”start_asr” 开始后台ASR识别,然后执行”after_action”: “playback”开始播放声音文件。
当用户说话后,机器人发送 识别进度,也就是用户暂停说话时间超过 min_pause_ms
smartivr –> web
{
"asrelapse": 391, //asr识别服务器消耗的时间,单位毫秒。
"asrtextall": "1.识别结果;", //包含之前停顿的识别结果的组合。 格式是 录音序号.识别结果;这样组合多个识别结果。
"asrtype": "aiui", //本次使用那个asr识别
"calleeid": "8888abc",
"callerid": "abc",
"callid": "1aec14af-d6a8-49e4-96fc-fb5f7cfdb893",
"errorcode": 0, //asr返回错误,0无错误。
"flowdata": "流程选择",
"flowid": "abc",
"message": "识别结果",
"notify": "asrprogress_notify",
"recordindex": "1", //录音序号
"recordfile": "", //录音文件
"recordms": 931, //录音时间,单位毫秒。
"volumegain": 5.95330699999 //音量标准化放大或者缩小的倍数。
}webserver根据业务逻辑返回是否需要暂停放音
smartivr <– web
{
"action": "console_playback",
"flowdata": "流程选择",
"params": {
"command": "pause"
}
}当用户说完一整句话,机器人发送 完整的识别结果,也就是用户暂停说话时间超过 max_pause_ms
smartivr –> web
{
"calleeid": "8888abc",
"callerid": "abc",
"callid": "ea6d1235-aaab-4251-b03b-3b53ca32e00d",
"errorcode": 0,
"flowdata": "流程选择",
"flowid": "abc",
"message": "1.你好;2.什么事;",
"notify": "asrmessage_notify",
"speakms": "1162" //整句话的说话时间,包含暂停时间
}webserver根据业务流程,执行话说逻辑,播放声音。
smartivr <– web
{
"action": "playback",
"flowdata": "回答",
"params": {
"prompt": "先生你好,请问你最近需要买房吗",
"wait": 3000,
"retry": 2
}
}当用户一直不说话,声音播放完成并且等待时间超过,机器人发送 playback_result
smartivr –> web
{
"calleeid": "8888abc",
"callerid": "abc",
"callid": "35bca774-5b3e-4129-a5e7-1c3c86605071",
"errorcode": 0,
"flowdata": "",
"flowid": "abc",
"message": "FILE PLAYED",
"notify": "playback_result"
}webserver根据业务流程发送 继续放音,提示用户回答问题。
smartivr <– web
{
"action": "playback",
"flowdata": "提示选择流程",
"params": {
"prompt": "请问你要进入哪个测试流程,比如,房产",
"wait": 3000,
"retry": 2
}
}
webserver 结束流程,播放一个提示声音,结束通话。
smartivr <– web
{
"action": "playback",
"suspend_asr": true, //播放提示音时候暂停ASR识别
"flowdata": "",
"params": {
"prompt": "谢谢你的使用,再见"
},
"after_action": "hangup",
"after_ignore_error": true,
"after_params": {
"cause": 0,
"usermsg": ""
}
}
faq
asrprogress_notify 的 asrmessage_notify 区别
简单点说asrprogress_notify就是用来控制是否需要打断,asrmessage_notify用来控制是否需要播放一个新的声音。
- asrprogress_notify 是识别进度通知,只能返回noop或者console_playback(pause)暂停放音,console_playback(resume)恢复放音。不能执行其他动作。asrprogress_notify后面可能再次出现asrprogress_notify,用户一整句话说完了,就会发送 asrmessage_notify 通知。
- asrmessage_notify 是识别完成通知,可以执行 playback 操作。播放一个新的声音,也可以noop,等其他任意动作。
- playback_result 声音播放完了,等待时间也超过了,还没检测到声音就发送这个通知。
console_playback(resume)恢复放音什么时候执行。
用户说话超过 pause_play_ms ,就会自动暂停放音,asrprogress_notify通知,ASR识别返回的是空,就是没识别到有效文本的时候,就可以返回 console_playback(resume) 来恢复放音了。
可能不怎么好理解, 就是 start_asr 的 pause_play_ms 参数,可以设置,检测到用户说话时间超过这个参数,就自动停止放音, 如果是噪音的话,asrprogress_notify返回的是无效文本,就可以利用asrprogress_notify来恢复这个给自动暂停的放音。
playback_result 什么时候有这个通知
执行 playback后,播放完成并且等待超时,就会发送playback_result 通知。
- 如果识别到用户说话,在 asrmessage_notify 事件中返回命令playback,播放了一个新的声音,那么上个playback会给强制终止(上次的playback_result就不会发送了。),新的播放完成时,才会发送playback_result。
- 如果识别到用户说话,在 asrmessage_notify 事件中返回命令noop,或者console_playback(resume),没去播放新的声音,那么还会发送playback_result 通知的。
- 如果asrprogress_notify 返回 console_playback(pause)暂停了播放,asrmessage_notify没有返回console_playback(resume)恢复放音,那么就一直卡着。 这样的用法是错误的,asrmessage_notify 如果没有返回playback播放新的声音,就必须console_playback(resume)恢复放音。
自动打断(就是检测到声音,就自动停止放音)
start_asr 有一个参数 pause_play_ms,demo是200, 就是检测到说话声音持续时间时间超过pause_play_ms,就自动暂停放音。如果你不需要这个功能设置为0, 如果你启用了这个功能,asrmessage_notify通知每播放一个新的声音就必须要恢复放音console_playback(resume)。否则机器人放音一直暂停着(收不到playback_result通知)。
业务打断(就是流程停止放音,或者播放一个新的声音实现打断。)
asrprogress_notify返回 console_playback(pause),或者asrmessage_notify返回播放新的声音,就会停止播放当前的声音。
怎么禁用打断功能
机器人放音的时候可以识别用户说话,但是不打断机器人放音:playback的allow_interrupt设置-1,关闭自动打断。asrprogress_notify返回 noop。 asrmessage_notif
如果playstate等于false(当前没放音),执行业务逻辑播放新的声音。asrmessage_notif如果playstate等于true(当前在放音,不处理),返回noop,并且把识别结果记录到flowdata,等paly_result的时候再处理识别结果。如果paly_result的时候检测放音过程是否有识别结果,如果有执行业务逻辑处理流程,如果没有返回wait.放音的时候直接暂停asr, 自然也就不会打断了。playback的block_asr设置为-1.本次放音,禁用了asr,就可以了。
噪音打断怎么解决(升级到5.0使用噪音人声识别可以解决噪音问题)
如果要完全避免噪音打断可以把自动打断关闭,使用关键词打断。如果要求不高可以把pause_play_ms设置大些,比如1000。playback新加了一个自动打断控制参数,可以设置本次机器人放音多久才启用自动打断。
怎么实现关键词打断
- start_asr的pause_play_ms 设置 0 ,关闭自动打断
- asrprogress_notify 的识别结果如果是关键词 返回 console_playback(pause),如果不是关键词 返回 noop
- asrmessage_notify 的整句话识别结果如果匹配,直接播放新的声音文件,执行新的业务流程,如果不匹配, 判断playstate(户说话结束的时候,机器人是否也放音完成),playstate为true返回console_playback(resume),playstate为false,执行playback_result通知一样的流程。
- playback_result 收到这个通知,说明声音播放完成,等待用户说话超时,asrstate为true是表示用户当前已经在说话, 可以返回noop,否则必须播放一个声音,提示用户说话。
多种打断方案集合使用流程
- start_asr 开始asr,设置 pause_play_ms 为 200-1000之间 (设置自动打断时间)
- playback wait设置 3000-5000,并且设置allow_interrupt动态修改自动打断时间,
- asrprogress_notify 检查是否有关键词有关键词返回console_playback(pause),没关键词返回 noop
- asrmessage_notify 根据识别结果,playms(用来判断 是否 机器人刚说话,用户也开始说话) ,playstate(用来判断 用户说话结束的时候,机器人是否也放音完成),等条件返回console_playback(resume)继续放音,或者返回playback播放一个新的声音。
- playback_result asrstate为true是表示用户当前已经在说话, 可以返回noop,否则必须播放一个声音,提示用户说话。
怎么实现放音的时候暂停ASR(就是机器人说话的时候,不识别用户说话,也不打断机器人说,类似单工模式一个人说一个人听。)
2.3版本playback添加了一个参数block_asr,playback的时候把block_asr设置为-1,就可以了。
机器人刚放音,用户也开始说话,或者用户刚开始说话机器人也开始放音,怎么解决。
asrprogress_notify和asrmessage_notify 新加了一个参数 playms,playms意思是用户开始说话时机器人放音时间(如果大于0就是放音时间),0就是机器人没在放音。
asrmessage_notify 的参数 playstate 表示用户说话结束的时候(发送asrmessage的时候)机器人是否在放音。
由此可以推断出 asrmessage_notify 的时候 如果 playms>0并且<2000(自己定义一个合适的),说明机器人刚开始放音用户就开始说话了。
如果 playms等于0,playstate等于true,说明用户刚开始说话,机器人也开始放音了。
超时的时候,用户刚好开始说话了怎么办
wait_result 和 playback_result 新加了1个参数 asrstate为true是表示用户当前已经在说话, 可以返回noop。否则必须返回wait,或者playback.
性别识别(男性女性声音识别)
asrprogress_notify 加了一个参数 gender 0未识别 1女 2男 3可能女 4可能男 其他系统错误
噪音人声识别(mod_vad 5.0开始支持)
如果有噪音识别授权 start_asr的filter_level 设置为 0.6:一句话结束判断声音是否是噪音。 0.7: 噪音的时候不掉用ASR。 0.8:VAD算法集成噪音和人声识别。 在0.6和0.7时设置asrprogress_notify 参数 noise 0:人声 1:噪音 -1:未启用。
怎么获取录音文件名
- asrprogress_notify 通知的 recordfile 字段就是本次识别的录音文件。
- asrmessage_notify 通知的 message 格式是 录音序号.识别结果; 其实通过这个录音序号就知道录音文件名的。因为录音文件名规范是 recordpath/callerid_callid_recordindex.wav 这样固定的格式的。 你可以把被叫号码,callid,录音序号组合一下就知道这个识别结果关联的文件名了。
一句话怎么有时候有多个录音文件
因为用户说话停顿时间超过 min_pause_ms ,就提交ASR识别(如果配置了保存录音会生成一个录音文件),识别结果通过 asrprogress_notify 通知业务程序。
停顿时间超过 max_pause_ms 认为说完一整句话,就发送asrmessage_notify通知给业务程序。
如果说一句话的过程,用户多次停顿,并且时间在 min_pause_ms和max_pause_ms之间,就会产生多个录音文件。
对接暂时界面上,好比我们微信聊天,对方说2句你回复1句是完全正常的情况,网页上展示2个或者多个录音文件就可以。
如果你想尽量的不要出现多次asrprogress_notify,可以把 min_pause_ms 设置大些,比如 min_pause_ms和max_pause_ms都设置800。这时候用户停顿800,才提交ASR,ASR识别的时候如果用户不说话,识别完成马上就发送asrmessage_notify通知,如果识别过程,用户又说话了,还是需要等新的ASR识别结果返回后,在发送asrmessage_notify,就出现多个asrprogress_notify了。
怎么知道主叫挂断还是被叫挂断
leave新加了一个参数 hangup_disposition recv_bye:对方先挂机, send_bye:机器人先挂机。
怎么把通话转接给分机或者手机
bridge就是实现这个功能的,可以把用户电话转接给分机或者客服手机,具体看bridge和bridge_result说明。
机器人一直不说话
流程出现这个问题一般是 playback_result通知asrstate等于false时没播放新的声音,或者asrmessage_notify没匹配关键词,并且playstate等于false的时候没播放新的声音。 playback_result通知asrstate等于false时和asrmessage_notify通知playstate等于false,这2个情况必须播放一个声音或者执行wait, 千万不要返回noop或者console_playback。
after_action 注意问题
- 例如 after:sotp_asr after_action:bridge, 如果没有先执行start_asr,那么sotp_asr就会失败,如果没设置after_ignore_error:true,就不会执行bridge。 注意点 after_ignore_error:true,才会不管第一个指令是否成功都执行第二个指令。
- 例如 after:sotp_asr after_action:bridge,sotp_asr指令还没执行的时候,可能出现asrmessage_notify通知,这样就破坏了组合指令的执行,设置 suspend_asr:true,系统就不会把 asrmessage_notify 通知发送给接口,避免 after和after_action之间出现asrprogress_notify和asrprogress_notify 通知干扰。
执行palyabck之后,收到了上一个palyback放音的识别结果,怎么区分。
3.0版本 asrprogress_notify 的 asrmessage_notify 通知加了一个lag参数,lag为true,就是上一个动作的识别结果。
场景说明,用户先说,哪里,过了1秒再说,哦不需要了。 smartivr先通知 “哪里”的识别结果,流程返回playback,这个声音文件还没开始播放, smartivr又通知 “哦不需要了”的识别结果。 “哦不需要了”的识别结果的lag会为true,流程判断lag就可以处理这样的情况了。
接口说明
注意:请求和返回都采用JSON格式,编码为utf8,所有参数区分大小写,数字和字符串类型注意区分,参数未说明数字类型就是字符串类型。
请求通用参数
- calleeid 通话被叫号码 自动外呼是流程ID(可以用来区分流程)
- callerid 通话主叫号码 自动外呼是被叫号码
- origcallerid 通话原始主叫号码 自动外呼是主叫号码
- callid 通话ID
- notify 通知类型
- enter 进入流程 比如来电应答后,外呼接通后进入流程
- leave 离开流程 比如挂机,转移,直接转接等。
- getdtmf_result 获取按键(dtmf)结果
- playback_result 放音结果
- bridge_result 转接结果
- start_asr_result 后台ASR启动结果
- stop_asr_result 后台ASR停止结果
- asrprogress_notify ASR识别进度
- asrmessage_notify ASR识别结果
- wait_result 等待超时
- transfer_result 转接完成
- flowdata 流程数据
- flowid 流程ID(可以设置为外呼任务ID)
- errorcode 错误代码 无错误时不存在这个值或者等于0
- message 自定义消息
- duration 持续时间,enter开始计时,可以用于控制对话总时间,比如持续时间超过3分钟就挂断通话。
- duration 持续时间,enter开始计时,可以用于控制对话总时间,比如持续时间超过3分钟就挂断通话。
- hangup 通话是否挂断,true已经挂断,false,未挂断。比如playback_result,wait_result,可以见检测一下通话是否挂断,如果已经挂段直接返回noop就可以。(注意发现FS在高并发下有BUG,会乱送CHANNEL_HANGUP消息,导致这个属性不准,请忽略这个属性,如果要解决放音的时候用户挂机问题,要结合 “errorcode”:-1, “message”:”PLAYBACK ERROR”,”notify”:”playback_result” 一起判断)
响应通用参数
- action 执行的动作名
* getdtmf 获取DTMF按键 * playback 播放声音 * bridge 转接到电话号码 * deflect 转移(SIP REFER ) * hangup 挂断通话 * noop 无操作,就是不需要执行任何动作。 * start_asr 启动后台ASR * stop_asr 停止后台ASR * console_playback 控制放音 * wait 等待 比如playback的时候设置suspend_asr关闭了ASR功能放音结束后可以用 wait + suspend_asr开启ASR功能,并且设置一个超时时间。 * transfer 转移,转移到指定的dialplan ,需要配合FreeSWITCH的dialplan使用 * redirect 重定向接口地址(4.3.2以上版本支持,只能enter通知时回复) - params action的参数,具体参考具体动作。
- after_ignore_error 如果action执行失败,是否继续执行after_action
- after_action 可选参数 JOSN对象。用于连续执行2个动作,比如playback后执行挂机。
- after_params 可选参数,JSON对象。after_action的参数内容。
- flowdata 可选参数,JOSN对象。动作执行完成的notify请求里会把这个数据发送回来(用来携带流程数据 类似cookie)。
- suspend_asr 可选参数,BOOL,如果之前已经执行了start_asr,通过通过这个参数,来暂停停用ASR,比如希望本次放音(playback),不要执行ASR,就可以把这个参数设置true. 注意:2.3版本后 playback添加了一个block_asr的参数可以更灵活的控制暂停识别。建议使用block_ack参数代替suspend_asr。
notify 描述
enter 进入流程 比如来电应答后,外呼接通后进入流程
{"calleeid":"996","callerid":"linphone","callid":"e56aff85-f8e9-4385-a67b-b7881329860d","notify":"enter"}
leave 离开流程 比如挂机(hangup),deflect,transfer。
{"calleeid":"996","callerid":"linphone","callid":"ceff27c7-fcd9-407c-9f9f-9ddea1a8aa5b","flowdata":"","notify":"leave"}
- hangup_disposition recv_bye:对方先挂机, send_bye:机器人先挂机。
asrprogress_notify
说话停顿min_pause_ms时间后返回的识别结果。
- asrtype 本次使用那个asr识别
- message 本次asr识别结果
- asrtextall 包含之前停顿的识别结果的组合。 格式是 录音序号.识别结果;这样组合多个识别结果。
- asrelapse asr识别服务器消耗的时间,单位毫秒。
- errorcode asr返回错误,0无错误。
- volumegain 音量标准化放大或者缩小的倍数。
- recordms 录音时间,单位毫秒。
- recordindex 录音序号
- recordfile 录音文件
- gender 性别识别 0未识别 1女 2男 3可能女 4可能男 其他系统错误 每个电话只识别前3句话。
- noise 0人声 1噪音 -1未启用
- playms 检测到说话声音起点时播放声音时间,0没放音 ,其他放音时间
- lag 布尔类型 true:本次识别结果是上一个动作的时候产生的,具体看faq lag说明
asrmessage_notify
说话停顿max_pause_ms时间后返回的真句话的识别结果。
message 整句话的识别结果。 格式是 录音序号.识别结果;这样组合多个识别结果。
speakms 整句话的说话时间,包含暂停时间
playms 检测到说话声音起点时播放声音时间,0没放音 ,其他放音时间
playstate 说话结束的时候(发送asrmessage的时候)是否还在放音。
quiescems 如果playstate 为false时会设置这个值(smartivr 5.13开始支持)放音停止时到当前的时间。
playpause 如果playstate为true的时候会这则这个值(smartivr 5.13开始支持)是否暂停了放音(比较自动打断)。
lag 布尔类型 true:本次识别结果是上一个动作的时候产生的具体 看faq lag说明。
getdtmf_result
获取DTMF返回
- message 获取到的DTMF按键内容
- errorcode 错误代码
- terminator 结束符
- result 返回原因 success:按键个数等于max,或者输入结束符。timeout:按时返回
playback_result
{"calleeid":"996","callerid":"linphone","callid":"4e11935d-127f-45d0-b395-9d6aa4d3430d","errorcode":0,"flowdata":""message":"FILE PLAYED","notify":"playback_result"}
- errorcode 0 播放完成,其他播放错误
- message 错误信息。
- asrstate 当前用户是否在在说话
bridge_result
转接结束,转接失败,或者转接成功通话结束才收到这个通知。收到这个通知后请挂断通话(返回 hangup),也可以继续执行asr流程。
{"calleeid":"996","callerid":"linphone","callid":"d0a3e9a8-2ce2-42e3-8fa7-55c5eb15326d","errorcode":480,"flowdata":"","hangupcause":"Temporarily Unavailable","message":"NO_USER_RESPONSE","notify":"bridge_result"}errocde sip返回的错误代码 ,0转接成功,
- message 结果描述
- hangupcause SIP挂断原因
transfer_result
{"calleeid":"8888","callerid":"linphone","callid":"1811135d-fae2-4550-978c-f5dd972a1483","errorcode":0,"flowdata":"","flowid":"","message":"_none_","notify":"transfer_result"}
转移到其他流程完成,注意电话挂断后才会发送 leave
stop_asr_result
停止后台asr完成
calleeid":"8888","callerid":"linphone","callid":"e757f1c1-c890-4b03-bced-dfdf84fd2419","errorcode":0,"flowdata":"","flowid":"","message":"SUCCEED","notify":"stop_asr_result"}
wait_result
等待超时
- message 不使用
- asrstate 当前用户是否在在说话
action 描述
start_asr
start_asr 是一个异步函数,只需要执行一次,启动后会一直进行VAD和ASR,直到调用sotp_asr
- min_speak_ms 最小说话时间,默认值100,单位毫秒,说话时间小于这个值,会被认为是无效声音。
- max_speak_ms 最大说话时间,默认值10000,单位毫秒,说话时间超过这个值,就停止录音,直接提交ASR服务器识别。
- min_pause_ms 最小停顿时间,默认值300,单位毫秒,默认值用户停顿时间超过这个值,会提交到ASR识别。识别完成后发送asrprogress事件。 完成后的意思是 ASR服务器可能 300-800ms才返回识别接口。
- max_pause_ms 最大停顿时间,默认值600,单位毫秒,用户停顿时间超过这个值,认为一句话说完,所有识别完成后发送asrmessage事件。所有识别完成后的意思是,所有提交到asr服务器的识别结果都返回了。 注意 max_pause_ms 必须大于min_pause_ms。
- pause_play_ms 触发暂停放音时间,默认值0,就是禁用自动打断,单位毫秒,建议设置200-1000,用户说话时间超过这个值,就暂停放音。 有时候用户一直持续说话,中间没停顿,所以还没提交到ASR服务器识别,不能使用关键词打断,需要自动暂停放音。playback的allow_interrupt可以动态调整这个值。
- threshold VAD阈值,默认0,建议不要设置,如果一定要设置,建议 2000以下的值。
- recordpath 录音文件路径,如果不设置(使用配置文件设置录音目录(smartivr.json),),如果设置了会保存录音文件到这个目录, 录音文件名规范是 recordpath/callerid_callid_recordindex.wav。
- volume 音量标准化的值。0-100,0不使用音量标准化,其他值 音量把录音音量调整到这个值后,再提交ASR识别。
- filter_level 防止干扰等级。0-1.0之间,无特殊要求设置为0。如果有噪音识别授权 0.6:一句话结束判断声音是否是噪音,通过asrprogress事件的noise标识。 0.7: 噪音的时候不掉用ASR。 0.8:VAD算法集成噪音和人声识别。
- asr_configure_filename asr配置文件名。可以不同呼叫使用不同的ASR配置。不设置就是使用默认配置(smartivr.json)
start_asr使用的配置文件
linux /etc/smartivr.json,windows freeswitchconsole.exe同一个目录 ,具体看配置说明
playback
播放一个声音文件
- prompt 声音内容wav文件(只支持8000hz,16位,单声道)或者文本。prompt 提示文本(如果最后4个字是.wav,就是录音文件放音,否则会调用TTS生成声音文件)。同样的文字TTS只转换一次,后续会使用缓存的文件
- wait 单位毫秒,放音结束后等待时间。用于等待用户说话。
- retry 重播次数。就是wait时间内用户不说话,就重新播放声音。
- block_asr 本次放音是否暂停ASR,(也就是关闭打断,同时不识别用户说话)
- -1 放音的时候不识别,进入等待的时候开启识别,比如 playback(file=”1.wav”,wait=5000) 就是播放1.wav的时候不识别,进入等待(5000毫秒)的时候开始识别用户说话。
- 0 禁用这个参数,不改变ASR状态。
- 大于0 单位毫秒,放音前面多少秒不识别。 playback(file=”1.wav”,wait=5000,block_asr=3000) 假如1.wav长度10秒,就是1.wav播放3秒后启动识别,前3秒忽略用户说话。
- tts_configure_filename tts配置文件名(绝对路径),不设置会使用默认smartivr.json.
- allow_interrupt 本次放音是否允许自动打断,0使用start_asr的pause_play_ms参数,,-1禁用自动打断(忽略start_asr->pause_play_ms参数),大于0就是覆盖start_asr->pause_play_ms参数设置。 默认自动打断时间是 start_asr->pause_play_ms参数指定的。注意:这个只是动态修改pause_play_ms的参数,对于业务控制的打断(暂停放音)没作用。
- block_interrupt 放音前面多少毫秒内禁止自动打断(smartivr 5.1.3 update 20230323开始支持) 。
多文件或者TTS和录音文件混合放音
prompt 使用数组方式就可以,比如
[
"/var/wav/1.wav",
"tts文字转声音",
"/var/var/2.wav"
]
sotp_asr
:{"action":"stop_asr","flowdata":"\u8bed\u97f3\u8bc6\u522b"}
停止后台ASR。
console_playback
用于播放控制,用户说话开始,先暂停播放,如果说的是无效声音,可以恢复播放。
- command
- pause 暂停播放
- resume 恢复播放
- stop 停止播放
bridge 转接电话
{"action":"bridge","flowdata":"","params":{"number":"sofia\/external\/a8008@sip.ddrj.com:16080","callerid":"","gateway":"","prompt":"\u6b63\u5728\u8f6c\u63a5\u4e2d\uff0c\u8bf7\u7b49\u5f85","background":"wating.wav"}}
- number 被叫号码,如果gateway没设置,必须是完整呼叫串类似:sofia/external/电话号码@网关Ip
- callerid 可选参数 主叫号码(对方看到的来电显示)
- gateway 可选参数 网关名字,如果注册模式也可以直接 user/分机号 这样的格式。
- background 可选参数 背景音乐
- prompt 可选参数 提示文本 prompt 提示文本(如果最后4个字是.wav,就是录音文件放音,否则会调用TTS生成声音文件)。
- timeout 可选参数 设置转接超时。
注意 请先执行 stop_asr,不然转接后还会继续进行语音识别
hangup 挂机
{"action":"hangup","params":{"usermsg":"not found notify"}}
- cause [数字] 可选参数 挂断原因根据sip信令设置 详细看 https://freeswitch.org/confluence/display/FREESWITCH/Hangup+Cause+Code+Table
- usermsg 可选参数 里面可以放置调试信息,smartivr会打印到日志文件。
noop 不需要执行任何动作时可以返回这个,比如(leave,asr_progress 通知可以返回noop)
{"action":"noop","params":{"usermsg":""}}
- usermsg 可选参数 里面可以放置调试信息,smartivr会打印到日志文件。
deflect 执行后会直接离开流程,收到 leave 通知
{"action":"deflect","flowdata":"","params":{"number":"1001"}}
- number 要转移的目的地(由呼叫方处理) 即: SIP REFER 的 URI。
getdtmf 接收用户按键
{"action":"getdtmf","flowdata":"","params":{"prompt":"","invalid_prompt":"","min":0,"max":128,"tries":1,"timeout":5000,"digit_timeout":3000,"terminators":"#"}}
- min [数字] 最少按键个数(minimum value of 0) ,注意最小和最大按键个数只有放音的按键才行,等待时候按键达到最小按键就返回了。如果最小按键设置为0,那么就不会等待按键,放音完成就返回。
- max [数字] 最多按键个数(maximum value of 128)
- tries [数字] 提示音播放次数
- timeout [数字] 等待按键最大时间,声音播放结束开始算起。
- terminators 结束输入按键,默认是#。
- prompt 提示音
- invalid_prompt 输入错误提示音
- regexp 输入按键规则(正则表达式)
- digit_timeout [数字] 按键超时时间,如果超时没有新按键,就认为输入完成。
transfer 执行后,要等电话挂断才会收到 leave 通知
action":"stop_asr","flowdata":"\u8bed\u97f3\u8bc6\u522b","after_action":"transfer","after_ignore_error":false,"after_params":{"destnumber":"test","dialplan":"XML","context":"default"}}
- destnumber 要转移的目的地
- dialplan 默认XML
- context 默认default
注意 请先执行 stop_asr,不然还是继续进行语音识别
wait 等待
{"action":"wait","flowdata":"","params":{"timeout":1000}}
- timeout 数字型 单位毫秒
redirect 重定向接口地址
(4.3.2以上版本支持,只能enter通知时回复,会对新的接口地址重新发送enter,flowdata如果不为空,会使用返回的flowdata,如果空,使用默认的)
{"action":"redirect","flowdata":"","url":"新接口地址"}
- url 新的接口地址
流接口支持(3.0版本开始支持)
流接口是VAD检测到开始说话就把语音流直接提交到 ASR 进行实时识别,这样识别速度比HTTP接口更实时。流接和http接口asrprogressnotify 、asrmessagenotify 通知参数有些差异,本文档将描述这些差异。
启用流接口
start_asr的asrconfigurefilename参数设置为 stream:127.0.0.1:9988,就可以了,格式是 stream:流识别代理服务器IP:端口。
流接口不支持男女识别,start_asr的volume 参数不会使用。
asrprogress_notify (流接口 每说1-2个字 就会发出 asrprogress_notify 通知。)
{“asrtype”:”stream”,”calleeid”:”8888”,”callerid”:”1000”,”callid”:”2df6b327-a8ef-416d-9504-721c5d71ce35”,”duration”:15,”errorcode”:0,”flowdata”:null,”flowid”:””,”hangup”:false,”message”:”你”,notify”:”asrprogress_notify”,”origcallerid”:”1000”,”playms”:0}
{“asrtype”:”stream”,”calleeid”:”8888”,”callerid”:”1000”,”callid”:”2df6b327-a8ef-416d-9504-721c5d71ce35”,”duration”:15,”errorcode”:0,”flowdata”:null,”flowid”:””,”hangup”:false,”message”:”你好”,notify”:”asrprogress_notify”,”origcallerid”:”1000”,”playms”:0}
比http接口 少了以下参数。
asrtextall
asrelapse
errorcode
volumegain
recordms
recordindex
recordfile
gender
noise
- 录音文件http接口是 asrprogressnotify 通知的时候生成录音文件。流接口是 asrmessagenotify 通知的时候生成录音文件。
- 识别结果,http接口是一段话通知一次识别结果,流接口是1-2个字通知一次识别结果。
asrmessage_notify
{“calleeid”:”8888”,”callerid”:”1000”,”callid”:”2df6b327-a8ef-416d-9504-721c5d71ce35”,”duration”:17,”errorcode”:0,”flowdata”:null,”flowid”:””,”hangup”:false,”message”:”你好?,”notify”:”asrmessage_notify”,”origcallerid”:”1000”,”playms”:0,”playstate”:false,”recordfile”:”./asr/20190531/1000_2df6b327-a8ef-416d-9504-721c5d71ce35_1.wav”,”speakms”:1285}
- 加了recordfile参数
- message参数没有序号。
人工监听和接管(3.02版本开始支持)
就是坐席可以监听机器人和客户对话,通过按DTMF*,可以直接接管机器人直接和客户对话。
监听
{“action”:”eavesdrop”,”flowdata”:{“flowtype”:”default”},”params”:{“dialstring”:”user\/1001”,”callerid”:”8888”},”after_action”:”playback”,”after_ignore_error”:true,”after_params”:{“prompt”:”开始呼叫分机实施监听,机器人流程可以继续执行”}}
action:eavesdrop,params.dialstring:这个是一个拨号串,分机例子:user/1000,外线例子:sofia/external/电话号码@vosip
系统会呼叫这个电话,电话接通后,就处于监听模式,听到机器人和用户对话。
是否已经开始监听成功,没有事件通知,如果需要知道是否监听成功,请使用sip.js,sipml5,或者sip客户端,接到电话去反馈结果。
如果需要分机接通后自动接管eavesdrop动作添加一个参数 “skip_eavesdrop”:true (smartivr 4.8.5 开始支持)
如果需要分机接通后,等待机器人当前放音完成时自动接管eavesdrop动作添加一个参数 “auto_bridge”:1或者2,模式1:放音暂停时就自动接管,模式2:放音完成时才自动接管。(smartivr 5.1.2 开始支持),如果设置了skip_eavesdrop,这个参数会给忽略。
人工接通后对人工端也开启实时质检 (smartivr 5.13版本开始支持) 添加了一个参数 asrparam:{“notify_url”:”http://ip/asrnotify",其他参看start_asr动作文档},可以把坐席端ASR识别结果通知到URL。用户端ASR继续通过samrtivr接口通知,返回noop就可以。
接管
在监听模式,按DTMF *,就进入接管模式。
{“calleeid”:”8888”,”callerid”:”1000”,”callid”:”f01c16f1-0096-490e-80fa-7d32812580b6”,”duration”:56,”errorcode”:0,”flowdata”:{“flowtype”:”default”},”flowid”:””,”hangup”:false,”lag”:false,”notify”:”bridge_notify”,”origcallerid”:”1000”}
进入接管模式 ,会发送”notify”:”bridge_notify”通知,直接返回 action:noop就可以了。这时停止了ASR识别和机器人放音,直到电话挂断,发送 action:levea, 注意进入接管模式不能返回机器人对话的。
对接大模型支持(需要2025年版本的mod_vad和asrproxy程序才可以支持)
大模型一次性返回
把普通tts放音改成流tts放音就可以,也就是把 playback的参数 比如 [“你好”] 改成 [“ws://asrproxyip:9989?text=你好”]
asrproxy tts参数说明 例子ws//ip:9989/tts?config=&voice=&volume=0&speechrate=0&pitchrate=0&engine=&text=%E6%88%91%E6%98%AF%E9%A1%B6%E9%A1%B6%E9%80%9A%E7%9A%84%E5%B7%A5%E4%BD%9C%E4%BA%BA%E5%91%98
- config:asrproxy程序的tts配置组
- voice:发音人。
- volume:TTS音量,0-100之间,0默认,100最大。
- speechrate:TTS语速,0-100之间,0默认,100最大。
- pitchrate:TTS语调,0-100之间,0默认,100最大。
- engine:引擎。
- text:语音合成的内容,在请求时,会使用utf8字符编码,然后进行url编码。
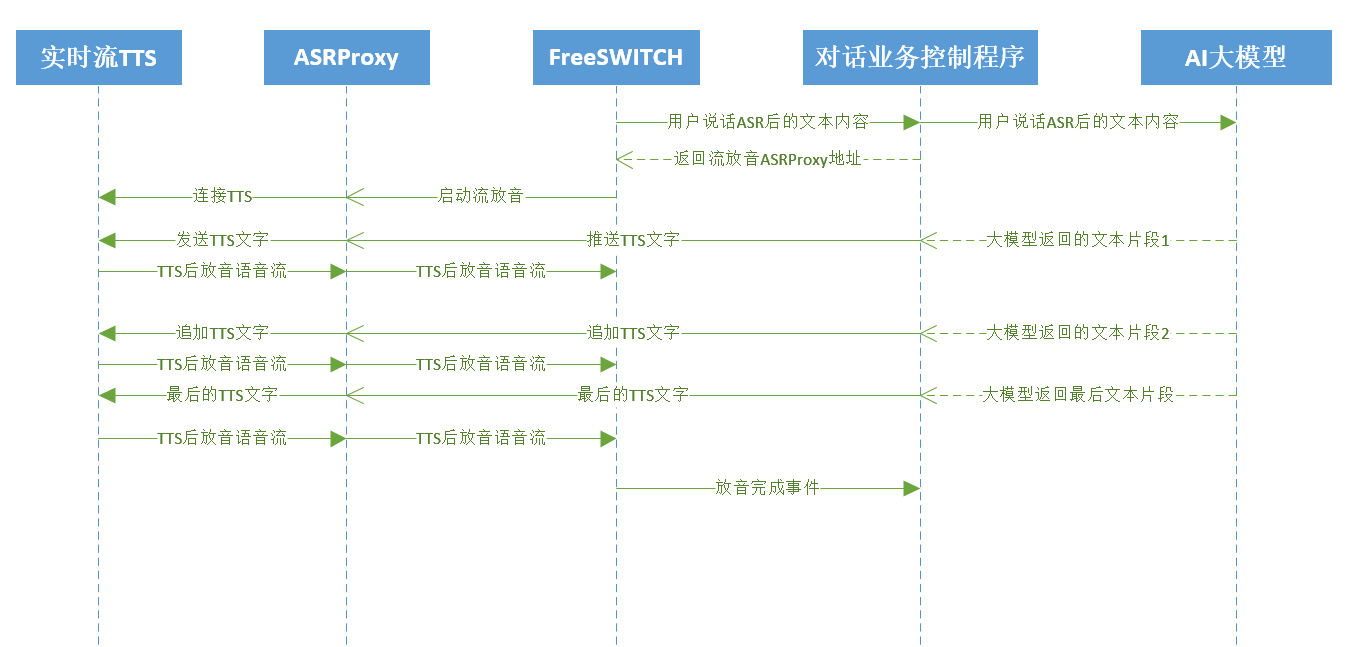
大模型流返回
普通的TTS是一次性提交文字,然后一次性返回的语音流。实时流TTS可以不断追加提交文字,逐步返回语音流非常适合用来对接大模型。
目前只有对接了cosyvoice这个实时流TTS。
实时流TTS需要额外的参数
- taskid 任务ID
- waittext 最大等待文本时间,单位毫秒
动态更新文字接口
- http://asrproxy_ip:9989/additiontext?text=文字&finish=0&taskid=任务ID
- text 要追加到tts的文字
- finish 是否结束文字输入,如果文字已经结束,要把finish设置为true
- taskid 就是对话接口里面的appid,用来知道更新哪个TTS放音的文字。
- http://asrproxy_ip:9989/additiontext?text=文字&finish=0&taskid=任务ID
tts参数waittext做什么用的。
- 如果waittext时间内,没有收到新的tts文字更新,就结束放音。
调用流程图